お知らせ
3次元データをどう取得?センシング技術について【点群処理シリーズ第3回】
シリーズ第2回では、点群データを取得する計測デバイスには、据置型・移動型・航空型といった用途に応じた型があることをご紹介しました。
今回は、計測デバイスがどのようにして対象物の3次元データを取得し、点群データを作っているか。
「センシング技術」についてご紹介します。
センシング技術の分類
計測デバイスが対象物をセンシングする方法は、計4つに分類することができます。
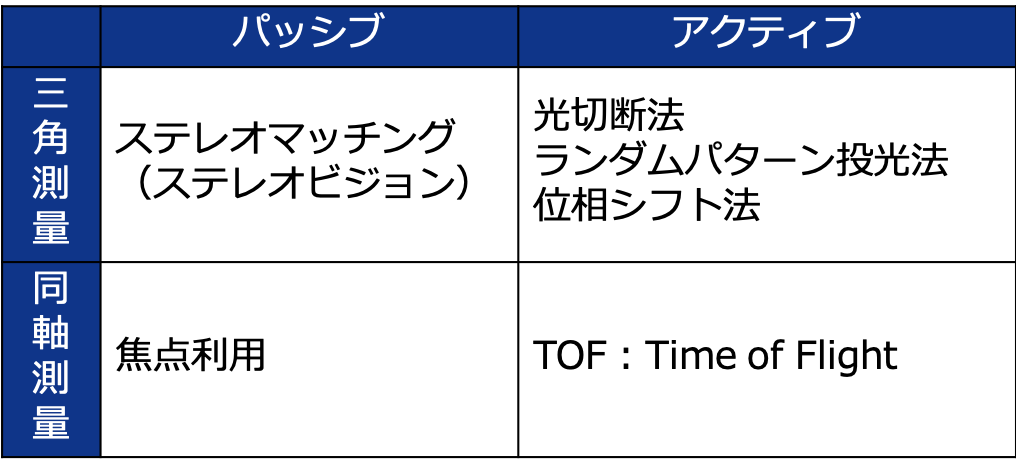
「パッシブ」センサーは、対象物が発する特徴(色、人体表面から放出される赤外線など)を受信します。つまり、光などのエネルギーを自ら発射せずに、受動的(=パッシブ)に受け取るセンサーです。
一方、「アクティブ」センサーは、センサー自体が能動的(=アクティブ)に光などのエネルギーを放射し、その反射の特徴を受信します。
このセンシング技術のうち、広く普及している「ステレオマッチング」と「TOF:Time OF Flight」が、それぞれどのようにして3次元データを取得しているかについて、簡単にご紹介します。
ステレオマッチング
ステレオマッチング(別名:ステレオビジョン)は、2台のカメラを用いて対象物を異なる方向から同時に撮影し、撮影した画像から得られる視差情報を利用することで、対象までの距離を算出する手法です。視差とは、2枚の画像間で対応する部位の位置の差のことを指します。人が目でモノを見るのと同じ原理ですね。
この視差からどのように距離を算出しているかを、簡易なモデルでご説明します。
まず、2台のカメラ間の距離と、各カメラの焦点距離が定まっているものとします。
続いて、2台のカメラにより対象を撮影することで、各CMOSセンサにおける対象点の画素位置の違いから、視差を推定します。
カメラ間距離B、焦点距離F、視差Dを用いることで、赤色三角形と緑色三角形の底辺と高さの比(B : Z = D : F)から、対象点までの距離Zを算出することができます。
Z = B * F / D
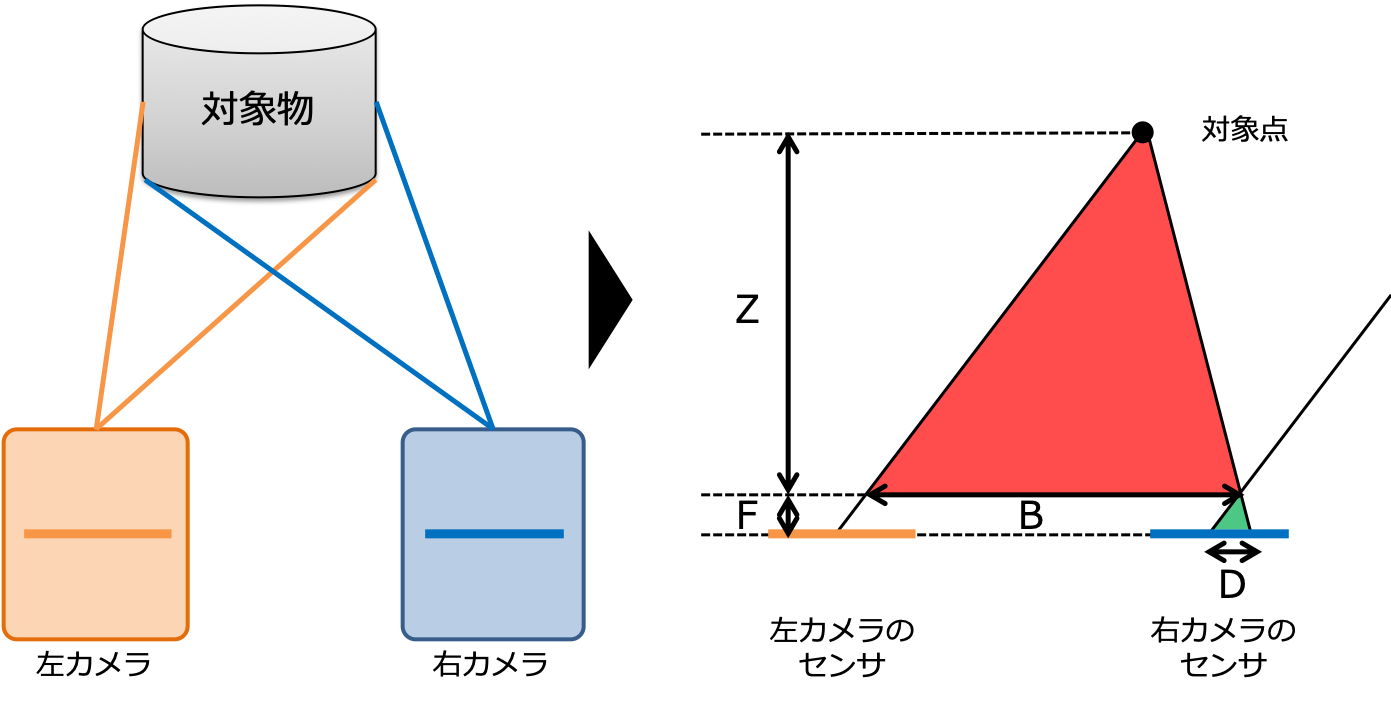
この距離Zをセンサのすべての画素で算出することで、カメラ画面内の対象を立体的に把握することができます。
このように、2台のカメラで対象点の画素位置の違いを比較(これを、マッチング、と呼びます)できれば、対象の3次元データを取得することができます。(注:ちなみに、マッチングには様々な手法があり、ここでの詳しい説明は割愛させていただきます。)
反対に、2台のカメラで対象点のマッチングが難しいと、対象点までの距離を算出することができません。例えば、次のような課題があります。
暗所

近くの対象

遠くの対象
巨大なデバイスが必要になる
とはいえ、カメラ2台で実現できるという低価格さは、点群データ取得における大きな強みですね。
ちなみに、同じ原理を用い、撮影済みの複数画像(例えば、動画のフレーム)から対象の3次元形状を復元する技術として、Structure from Motion(SfM)があります。リアルタイムに3次元データを取得する技術ではないため、例えば自動運転用途には適しません。ただ、スマートフォン1台で撮影した動画からでも点群データを作ることもできる簡単かつ面白い技術です。別記事で紹介したいと思います。
TOF:Time Of Flight
TOFは、センサから照射した光が対象に当たり、反射した光がセンサに戻ってくるまでの時間を、何らかの方法で求めることにより距離を算出する技術です。
この時間を求める代表的な方式には、「時間差(直接方式)」と「位相差(間接方式)」の2種類があります。(注:Time Of Flight=光走行時間法、という言葉のイメージとしては「時間差」のみですが、「位相差」を含めてTOFと呼ぶことが多いです)
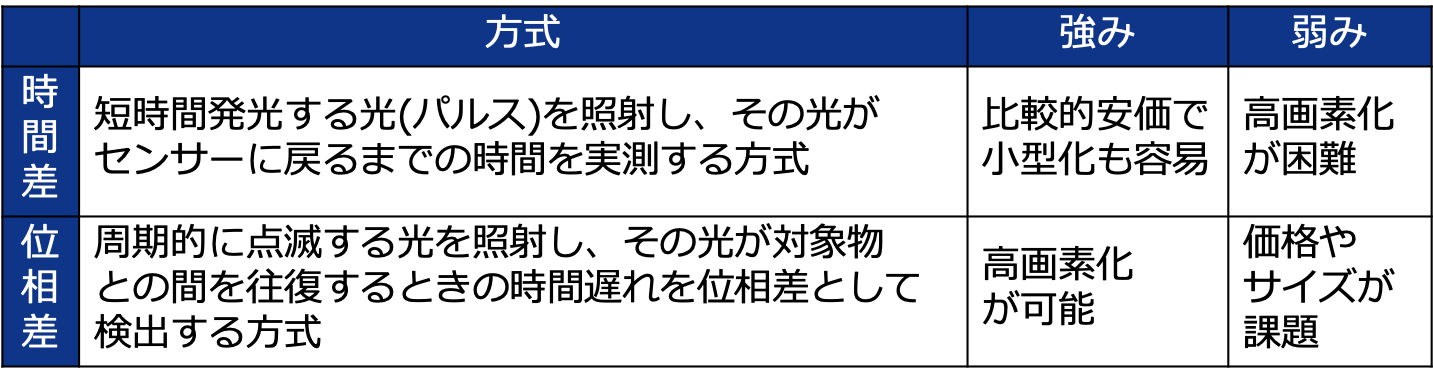
TOFには、吸収率が高い黒体、またガラスなど透過率の高い物体など、光を反射しない物体のセンシングは難しい、という課題があります。


これは、TOFに限らず、アクティブセンサー全般に言える課題ですね。
とはいえ、ステレオマッチングが苦手とする暗所でも距離を算出することができるのは大きな強みですね。
新型iPad Pro(2020年4月発売)に搭載されているLiDAR(レーザー光を使ったレーダー)も、このTOF式のセンサーです。

2020年4月時点では、時間差が主流のTOFですが、周波数の変化を検知する方法など、位相差を含めて高画素・高精度化に向けた開発が進んでおり、今後の利活用性拡大に期待です。
さて、対象物の3次元データを取得する「センシング技術」をご紹介いたしました。
いかがだったでしょうか。
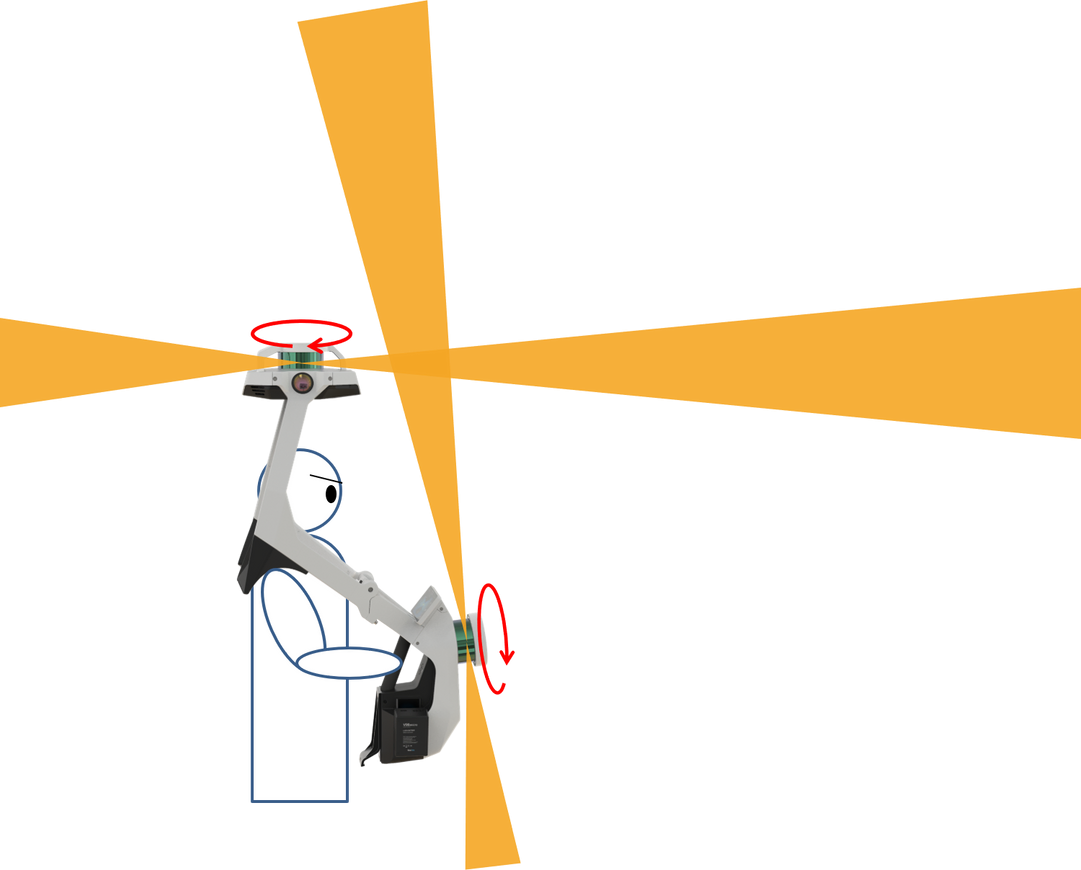
ちなみに、弊社のNavVis VLX3は、TOF式のLiDARを2台搭載した移動式計測デバイスです。
次回は、この「LiDAR」について、ご紹介の予定です。
お楽しみに。
参考文献
[1] 第21回定例研究会資料:『物体認識のための3次元データ処理 -3次元特徴量を中心として- 』(橋本学氏(中京大学)
【点群処理シリーズ】
第1回:点群とは
第2回:計測デバイスあれこれ
第3回:3次元データをどのように取得?センシング技術について