お知らせ
【技術ブログ】NavVis VLXの点群密度
NavVis VLXで取得した点群データの最小密度(解像度)は「5mm」です。

NavVis VLXは、搭載している2台のLiDARそれぞれで毎秒300,000点/台をセンシングしながら、移動による累積で1データセットにおいて膨大な座標情報(測定点)を記録しています。その大量の測定点には、遠くからのレーザー照射による精度の低いデータや、近くを何度も通ってレーザー照射された密なデータなど、1つのデータ内の同じ空間に条件の異なるデータが混在しています。
この混在したデータから高い精度の点群データを出力するために、NavVis VLXは後処理ソフトでの解析時に、ボクセルフィルタリング(voxel-based structure)によって測定点を間引いています。
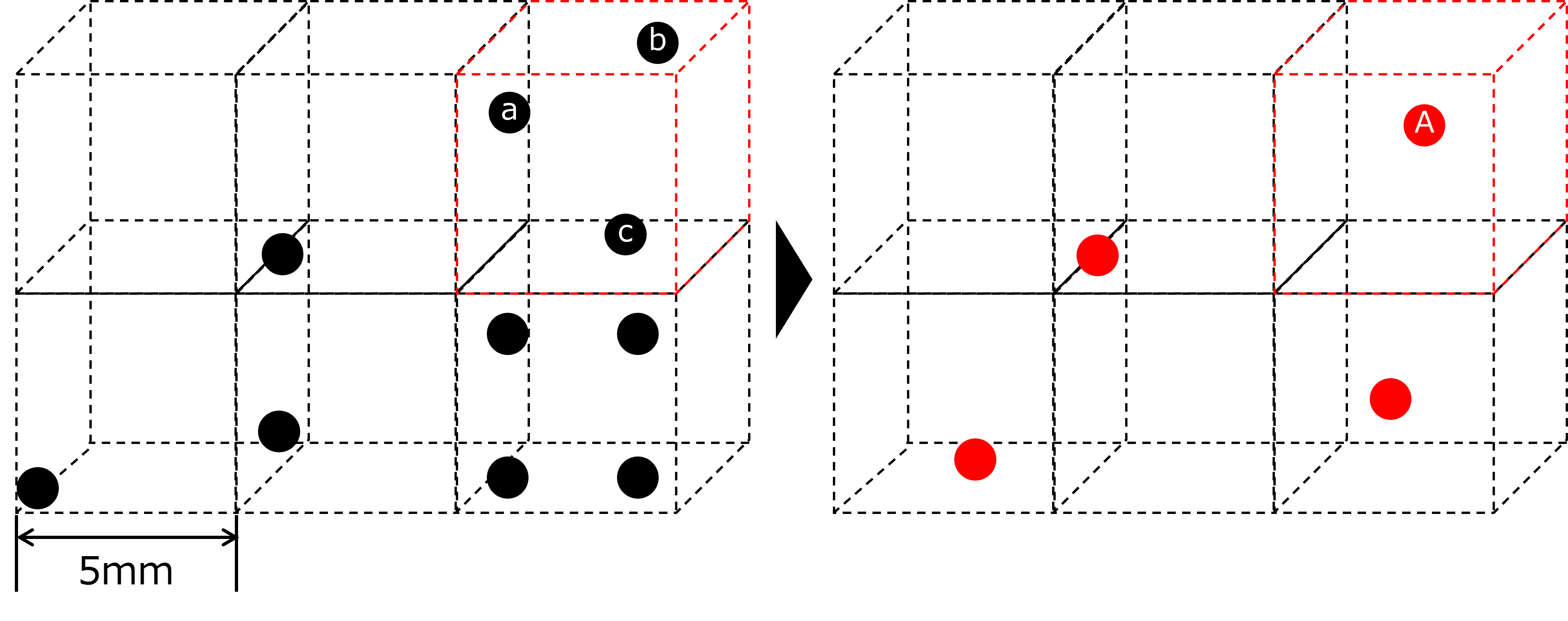
Step1:測定点を近傍のボクセルに割り当てる
Step2:各ボクセル内にある測定点の座標値の平均を算出し、これをボクセルの重心とする。
Step3:ボクセルの重心を、点群データの1点として出力する
例えば下図の場合、測定点a, b, cの重心Aが、点群データの1点として出力されます。ボクセル内の測定点が1点のみの場合、その点がそのまま点群データの1点として出力されます。
※原理はTLSと同じです。TLSも精度向上のために、1地点でのスキャンで、同じ角度で複数回レーザーを照射し、最終的に1ブロックに1点のみ残して出力しています。
このような原理に基づいて点群データを出力するため、1か所に時間をかけて計測したとしても、点群データが5mmピッチの解像度よりも細かくなることはありません。長時間同じ場所に留まって計測したとしても、必要以上に何度も同じ場所を通って計測したとしても、5mm立方の箱の中に残る点は最大1点までになります。